I am a postdoctoral researcher at the Autonomous Multi-Robots (AMR) Lab in Cognitive Robotics, Delft University of Technology, Netherlands. My research interests mainly include robot perception and spatial AI for mobile robots and multi-robot systems, with a special focus on dynamic environments. The goal is to make robots working in human environments safely and efficiently. In my spare time, I also work on automatic robot design using my knowledge in optimization, machine learning and object representations. I am always looking for opportunities to collaborate with other researchers and students.
Current Research Topics
Experience

Delft University of Technology
Postdoctoral Researcher in Autonomous Multi-Robots (AMR) Lab
[2023.2 - Present]

ETH Zurich
Visiting Researcher in Mobile Robotics Lab (MRL)
[2025.8 - 2025.9]

Shanghai AI Lab
Intern in OpenRobot Lab
[2022.8 - 2023.1]
Delft University of Technology
Visiting Ph.D. Student in Autonomous Multi-Robots (AMR) Lab
[2021.10 - 2022.5]
Education

Shanghai Jiao Tong University
Ph.D. Student in CIUS Lab
[2016.9 - 2022.12]
Shanghai Jiao Tong University
Undergraduate Student in ME
[2016.9 - 2022.12]
Recent Work Video
Selected Publications
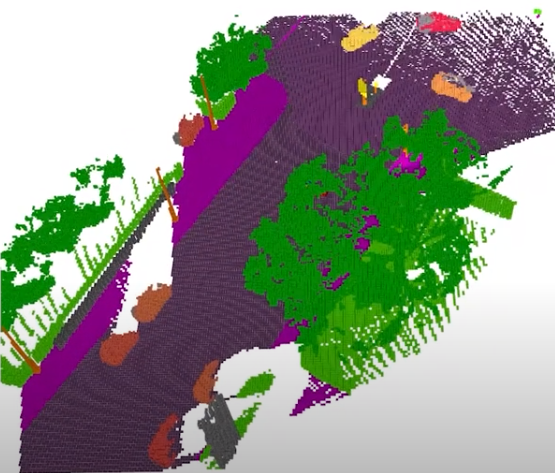
Particle-based Instance-aware Semantic Occupancy Mapping in Dynamic Environments
Authors: G Chen, Z Wang, W Dong, J Alonso-Mora
Year: 2024
Journal: IEEE Transactions on Robotics (Accecpted)
Abstract: Representing the 3D environment with instance-aware semantic and geometric information is crucial for interaction-aware robots in dynamic environments. Nevertheless, creating such a representation poses challenges due to sensor noise, instance segmentation and tracking errors, and the objects' dynamic motion. This paper introduces a novel particle-based instance-aware semantic occupancy map to tackle these challenges. Particles with an augmented instance state are used to estimate the Probability Hypothesis Density (PHD) of the objects and implicitly model the environment. Utilizing a State-augmented Sequential Monte Carlo PHD (S$^2$MC-PHD) filter, these particles are updated to jointly estimate occupancy status, semantic, and instance IDs, mitigating noise. Additionally, a memory module is adopted to enhance the map's responsiveness to previously observed objects. Experimental results on the Virtual KITTI 2 dataset demonstrate that the proposed approach surpasses state-of-the-art methods across multiple metrics under different noise conditions. Subsequent tests using real-world data further validate the effectiveness of the proposed approach.
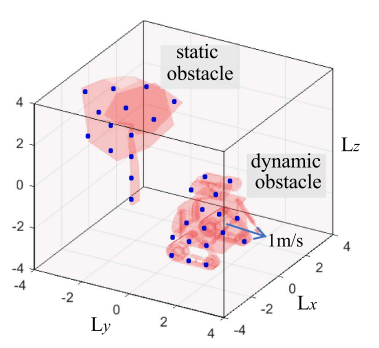
Continuous occupancy mapping in dynamic environments using particles
Authors: G Chen, W Dong, P Peng, J Alonso-Mora, X Zhu
Year: 2023
Journal: IEEE Transactions on Robotics
Abstract: Particle-based dynamic occupancy maps were proposed in recent years to model the obstacles in dynamic environments. Current particle-based maps describe the occupancy status in discrete grid form and suffer from the grid size problem, wherein a large grid size is unfavorable for motion planning while a small grid size lowers efficiency and causes gaps and inconsistencies. To tackle this problem, this article generalizes the particle-based map into continuous space and builds an efficient 3-D egocentric local map. A dual-structure subspace division paradigm, composed of a voxel subspace division and a novel pyramid-like subspace division, is proposed to propagate particles and update the map efficiently with the consideration of occlusions. The occupancy status at an arbitrary point in the map space can then be estimated with the weights of the particles. To reduce the noise in modeling static and dynamic obstacles simultaneously, an initial velocity estimation approach and a mixture model are utilized. Experimental results show that our map can effectively and efficiently model both dynamic obstacles and static obstacles. Compared to the state-of-the-art grid-form particle-based map, our map enables continuous occupancy estimation and substantially improves the mapping performance at different resolutions.
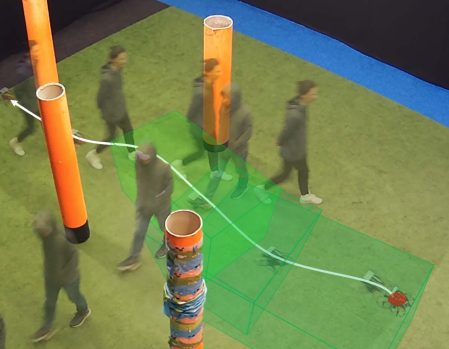
Rast: Risk-aware spatio-temporal safety corridors for mav navigation in dynamic uncertain environments
Authors: G Chen, S Wu, M Shi, W Dong, H Zhu, J Alonso-Mora
Year: 2022
Journal: IEEE Robotics and Automation Letters
Abstract: Autonomous navigation of Micro Aerial Vehicles (MAVs) in dynamic and unknown environments is a complex and challenging task. Current works rely on assumptions to solve the problem. The MAV’s pose is precisely known, the dynamic obstacles can be explicitly segmented from static ones, their number is known and fixed, or they can be modeled with given shapes. In this letter, we present a method for MAV navigation in dynamic uncertain environments without making any of these assumptions. The method employs a particle-based dynamic map to represent the local environment and predicts it to the near future. Collision risk is defined based on the predicted maps and a series of risk-aware spatio-temporal (RAST) safety corridors are constructed, which are finally used to optimize a dynamically-feasible collision-free trajectory for the MAV. We compared our method with several state-of-the-art works in 12000 simulation tests in Gazebo with the physical engine enabled. The results show that our method has the highest success rate at different uncertainty levels. Finally, we validated the proposed method in real experiments.
An active sense and avoid system for flying robots in dynamic environments
Authors: G Chen, W Dong, X Sheng, X Zhu, H Ding
Year: 2021
Journal: IEEE/ASME Transactions on Mechatronics
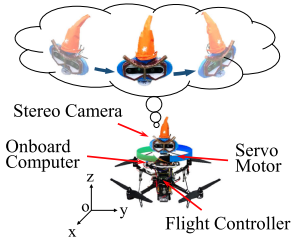
Abstract: This article investigates a novel activesensing-based obstacle avoidance paradigm for flying robots in dynamic environments. Instead of fusing multiple sensors to enlarge the field of view (FOV), we introduce an alternative approach that utilizes a stereo camera with an independent rotational degree of freedom to sense the obstacles actively. In particular, the sensing direction is planned heuristically by multiple objectives, including tracking dynamic obstacles, observing the heading direction, and exploring the previously unseen area. With the sensing result, a flight path is then planned based on realtime sampling and uncertainty-aware collision checking in the state space, which constitutes an active sense and avoid system. Experiments in both simulation and the real world demonstrate that this system can well cope with dynamic obstacles and abrupt goal direction changes. Since only one stereo camera is utilized, this system provides a low-cost and effective approach to overcome the FOV limitation in visual navigation.

Computationally efficient trajectory planning for high speed obstacle avoidance of a quadrotor with active sensing
Authors: G Chen, D Sun, W Dong, X Sheng, X Zhu, H Ding
Year: 2021
Journal: IEEE Robotics and Automation Letters
Abstract: Quadrotor with active sensing was proposed recently to overcome the view field limitation and achieved an excellent perception ability in obstacle avoidance tasks. To realize high-speed flights of this quadrotor in unknown and cluttered environments, a computationally efficient trajectory planner is presented in this letter. Firstly, a non-taboo area gradient-based sampling (NAGS) algorithm is utilized to sample a multi-objective-directed collisionfree local path. The algorithm runs in the state space with the consideration of active sensing direction and is able to find a feasible path in a few trials without falling into local minima. To further enhance real-time processing, a motion primitive generation algorithm concerning both time optimality and jerk optimality is raised, in which an offline and online integrated solver is utilized to achieve computational efficiency. This planner is tested and benchmarked against the state-of-the-art planners for high-speed flight. Real-world experiments show that our active sensing quadrotor with the proposed planner achieved a flight speed up to 5.2 m/s in an unknown and dense woods and managed to handle abrupt changes in goal direction at such a high speed.