Projects
INTERACT: Intuitive Interaction for Robots among Humans [Ongoing]
This project addresses the interaction of highly automated vehicles with vulnerable road users (VRU) such as pedestrians and cyclists, in the context of future urban mobility. The project pursues an integrated approach, covering the spectrum of VRU sensing, cooperative localization, behaviour modeling and intent recognition and vehicle control. Within the AMR group we focus on the vehicle control, enabling safe and efficient autonomous driving. Check out the project website here!
Uncertainty-aware Obstacle Avoidance in Dynamic Environments [2020-2022]
We want to realize obstacle avoidance of the quadrotor with very limited sensing and computing power in dynamic environments. Our methods include two main parts: 1. A Dual-Structure Particle-based (DSP) map, which can represent and predict the occupancy status of the neighborhood area continuously and rapidly. This is the first 3D dynamic occupancy map that can be used in onboard CPUs in real-time. 2. Risk-aware sampling-based/optimization-based trajectory planning methods, which are used to plan a safe trajectory for quadrotors in dynamic environments.

Active Sensing and High-speed Obstacle Avoidance of MAVs [2019-2021]
We worked on MAVs with active sensing to overcome the view field limitation and achieved an excellent perception ability in obstacle avoidance tasks. We planned sensing dicrection for a camera with individual DOF according to the environment and flight condition. To realize high-speed flights of the MAV in unknown and cluttered environments, a computationally efficient trajectory planner was also presented. Our MAV reached over 6 m/s in woods and also relatively safe performance in dynamic environments.

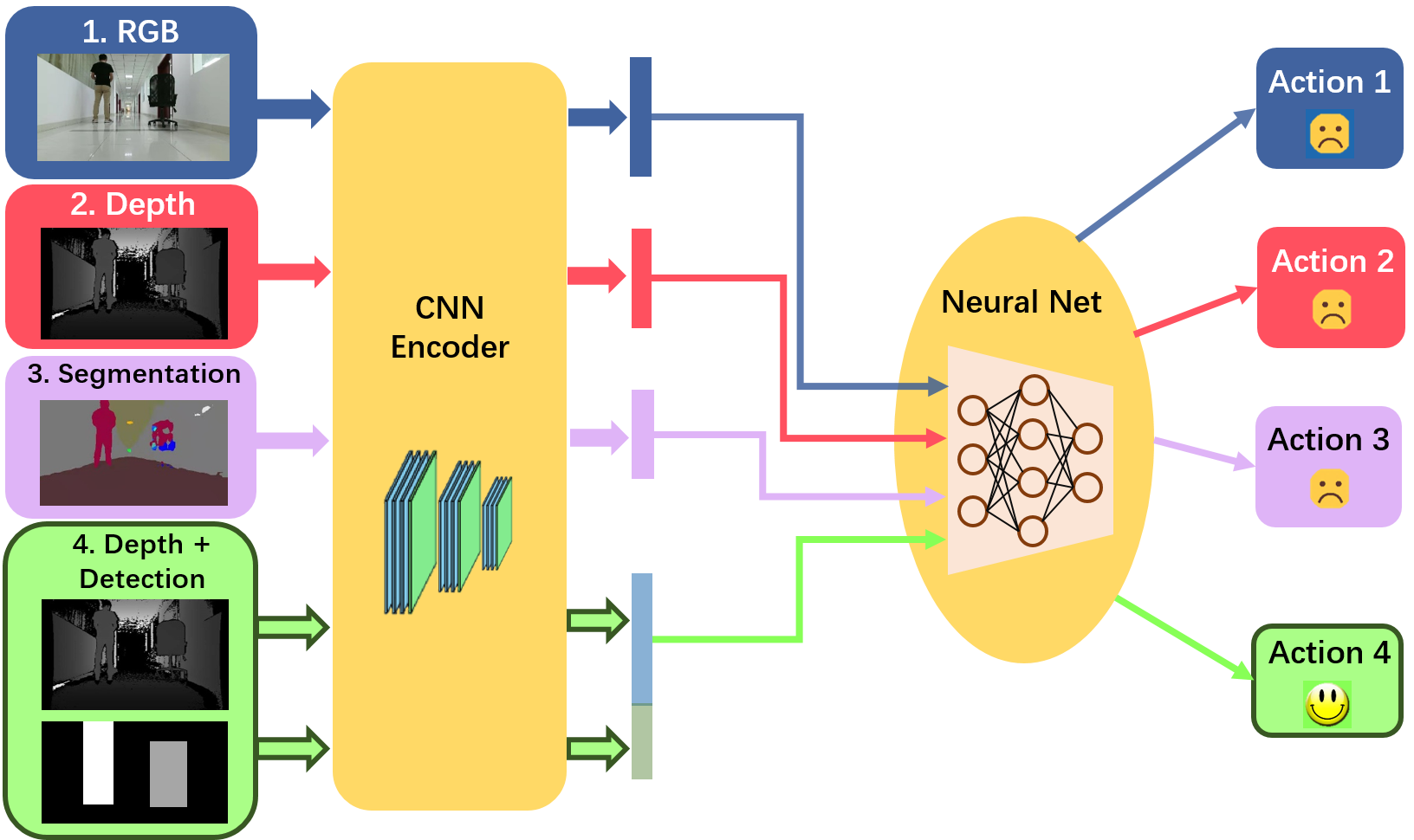
End-to-end Navigation of a Mobile Robot [2018-2019]
This project is to systematically investigates environment representations for visual navigation through sim-to-real transfer learning. Three criteria for a proper representation is proposed and an end-to-end navigation model is presented.